
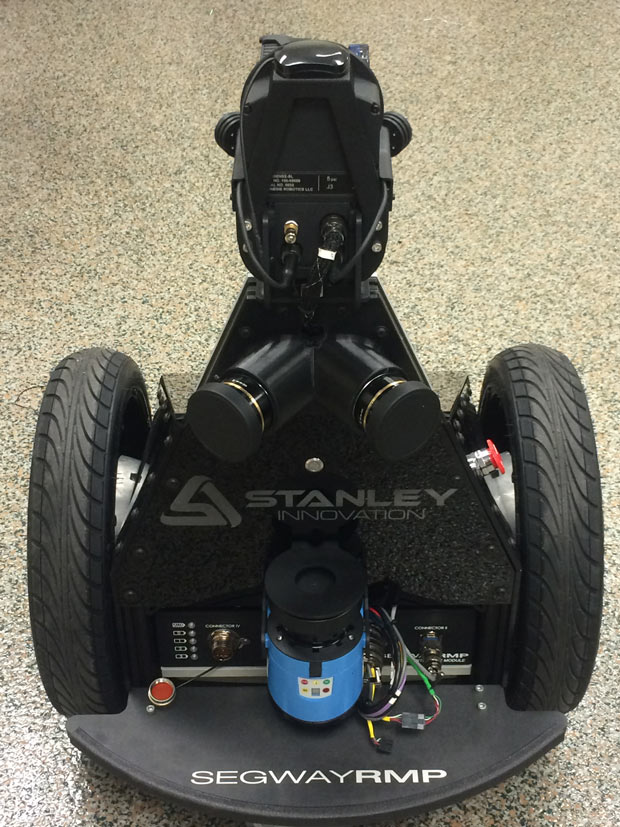
In response to a research request, Stanley Innovation created ROS-compatible Segway RMP integrated with the sensors required for the requested navigation capabilities. Image courtesy of Stanley Innovation.

Latest News
June 1, 2016
When Stanley Innovation was approached by a world-renowned research university wanting to develop a robot that could perform a variety of navigation tasks, the solution was obvious: Build a Robotic Mobility Platform (RMP) compatible with Robot Operating System (ROS), with top-notch sensor technology.
 In response to a research request, Stanley Innovation created ROS-compatible Segway RMP integrated with the sensors required for the requested navigation capabilities. Image courtesy of Stanley Innovation.
In response to a research request, Stanley Innovation created ROS-compatible Segway RMP integrated with the sensors required for the requested navigation capabilities. Image courtesy of Stanley Innovation.The request from researchers challenged Stanley engineers to create a mobile robot not only capable of performing at a high level in today’s research laboratories but also to provide a foundation for researchers eager to tackle next generation navigation algorithm research. Stanley’s solution was a ROS-compatible Segway RMP integrated with the sensors required for the requested navigation capabilities.
Why RMP?
RMPs offer high power density using a fielded propulsion system that has been tested to transportation standards and mass-produced for 12 years. Stanley Innovations says its Segway Robotic Mobility Platforms are powerful, reliable and proven — not to mention scalable.
Why ROS?
The Robot Operating System, or ROS is a collection of software frameworks for robot development. Because ROS is open source and increasing in popularity, it’s an option for developers who want to get an autonomous mobile robot up and running as soon as possible.
Bringing Robotic Sensors Together with ROS and On-Board Computing
Just like humans, mobile robots need to be able to sense their environment. And just like humans, a robot’s performance is only as good as the data coming in. So for those needing highly reliable localization, the robot needs the best sensors. To meet the researchers’ requirements, Stanley Innovation made use of some highly regarded sensors, including Carnegie’s 3D MultiSense SL and SICK’s LMS100 LiDAR laser measurement system.
- The MultiSense SL, a tri-modal (laser, 3D stereo and video), is a high-resolution, high-data-rate, and high-accuracy 3D range sensor. The sensor is suitable for use in a wide variety of robotics, automation, and sensing applications. It’s packaged in rugged, compact housing, along with a low-power FPGA (field programming gate array) processor.
- The SICK LMS 100, a laser measurement system suited to both indoor and outdoor applications, allows for 270º scanning angles, high detection capability, integrated distance measurement, dynamically switching monitored fields and unsurpassed stable object detection.
Other sensors used on this ROS-integrated robot included:
- A 3DM Micro Strain Inertial Sensor, designed to provide 3-axis static and quasi-dynamic orientation measurements. It incorporates 3 accelerometers and 3 magnetometers together with an on-board microprocessor, embedded software algorithm, non-volatile memory for configuration, and serial communication interface.
- Point Grey Research Flea3USB3 Camera, actually a second set of cameras to eliminate blind spots. A 6mm lens gives a field of vision of approximately 80×60. Combined with the planar laser, these cameras provide 360° coverage.
More Info
Subscribe to our FREE magazine, FREE email newsletters or both!
Latest News


