Chasing Blue Twilight
Chronicling the Adventures of FIRST Robotic Team 2220

Latest News
March 11, 2010
By Kenneth Wong
 Fig 1. The diagram of the side frame and the kicking mechanism in Blue Twilight’s robot, as conceived in cardboard model and in Pro/ENGINEER. |
If you’re curious about the load FIRST Robotic Team 2220’s creation could carry, team caption Alex Sorenson and team member Cooper Mckinnon could provide personal testimony. Each weighing roughly 150 lbs, the two volunteered to be lifted by their robot. The robot managed to hoist them off the ground simultaneously, according to eyewitness Alex Anderson, another team member.
Last November, team members spent their free Sunday afternoon hauling grocery bags because, even with several staunch corporate sponsors, 2009 proves a lean year for fundraising. Last year, the team started raising funds late, but by November, they’d collected enough to cover their anticipated expenses. “But it’s been tight this year,” acknowledged Ed Anderson, the team’s CAD mentor and Alex Anderson’s father.
Nevertheless, the team forges ahead, armed with a copy of PTC Pro/ENGINEER to digitally test our and troubleshoot their design ideas. This year, Desktop Engineering is honored to follow and chronicle the adventures of the team, nicknamed Blue Twilight.
Weekend Grocery Baggers and Hot Dog Vendors
At about 10 AM on Sunday November 22, Blue Twilight team members strolled into the Cub Foods (a popular supermarket chain in upper midwest) on Diffley Road, about three blocks away from their alma mater Eagan high school. Spanning out behind the checkout lines, the students approached the customers and inquired if they’d like their groceries bagged. If someone said, “Yes,” they would then pack his or her purchases and help load the bundle onto the waiting van. Should the customer feel inspired to reward them, they’d direct him or her to the tip jar on a table by the exit.
Come April 2010, instead of packing produce, they hope to pack a punch—a robotic punch—at the Minnesota 1,000 Lakes and North Star FIRST regional championship competitions.
 Fig 2. 3D CAD model of the team’s robot, along with the completed model. |
In summer, some of them peddled hot dogs in front of Von Hanson, a local meat market, for $1.50 to $2 a piece. (They had the merchant’s blessings. In fact, the merchant donated the lunch meat they needed to make hot dogs.) Others worked for roughly 6 to 7 hours in the concession stand of a nearby amusement park, then put their paychecks into the general funds for the team.
Digitizing the Robot
For concept design, the team uses PTC’s Pro/ENGINEER CAD software. CAD mentor Ed Anderson recalled, “]Last year,] our use of CAD was primarily documentary; Alex ]Anderson] took a lot of measurements of the in-progress robot, and made the model from those … after we shipped the robot, we were able to withhold 35 pounds of material ]according to the rules of the competition], which we used to fashion a key piece of the robot, and we needed to refer often to the CAD model to determine the space this piece had to fit into …”
Kickoff
On January 9, Blue Twilight team members were in the 1,500 who had assembled inside University of Minnesota’s Northrop Auditorium, shouting and cheering like the teenage mob that once greeted The Beatles in their American debut on the Ed Sullivan show.
The date marked the official start of Minnesota FIRST Regionals, eagerly awaited by FIRST Robotic Competition team members, their fans, parents, and mentors. This year, kick off is more than a figure of speech, because the challenge is “Soccer with a Twist”: Each team must attempt to score by kicking, rolling, and shooting a standard soccer ball into designated goals. Needless to say, the kicking mechanism will play a critical role in each robot.
Team mentor Ed Anderson observed, “Since the bumper can be a certain range of heights above the ground, and the ball is allowed to go under the bottom of the bumper to a maximum penetration of six inches, we reasoned that at maximum penetration, the maximum elevation we can put on the ball as we kick it is determined by the bottom edge of the bumper. To determine that elevation, we needed to plot a line tangent to the ball and coincident with the foremost bottom corner of the bumper, then calculate that line’s angle from horizontal. Pro/ENGINEER did all the heavy lifting for us, and when we raised or lowered the bumper, it steepened or shallowed the angle automatically also, so we could get immediate feedback on our possible kick angle.”
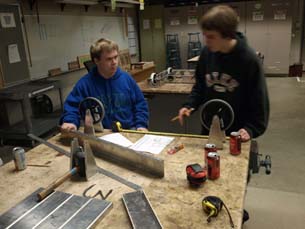 Fig 3. Team members figure out the proper way to attach the latch. |
Delving into 3D Printing
This year, Blue Twilight has two official sponsors: Lockheed Martin and Thomson Reuters. By DE’s introduction, the team has come in contact with Solido, a 3D printing technology developer, which agreed to support the team by providing courtesy 3D prints of critical parts.
“We decided to have just two pieces 3D printed: the frame and the latchpiece from the kicker, because if we tried to scale the entire robot, either some pieces would be too small and would break easily, or the model would be too large to display in our pit at competition,” explained Alex Anderson. STL files exported from their Pro/E model are on the way to Solido. The team awaits results.
For updates, visit Team 2220’s home page and visit Virtual Desktop blog.
Subscribe to our FREE magazine, FREE email newsletters or both!
Latest News
About the Author
Kenneth Wong is Digital Engineering’s resident blogger and senior editor. Email him at [email protected] or share your thoughts on this article at digitaleng.news/facebook.
Follow DE

