Helping design and engineering professionals discover, evaluate and specify technologies and processes that shorten the design cycle and enable success.
Digital Engineering April 2026
In the latest issue of Digital Engineering, we take a look at the latest innovations in design for additive manufacturing, including the use of natural language inputs, social media cosplayers, and AI integration. The issue also includes a feature…

January Special Focus Issue: Design for Additive
In this Special Focus Issue of Digital Engineering, learn about the latest advancements in design for additive manufacturing, including new software tools, additive in automotive, custom medical devices, and more.
The search for versatile and adaptable systems is a driving force in robotics research. Traditional robotic systems rely on fixed structures, limiting their adaptability in dynamic environments. If robots could reconfigure their form and function on demand, they become more useful in various settings.
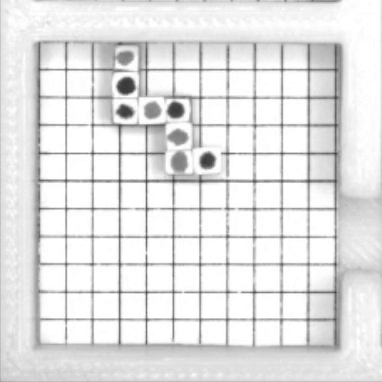
While completing his Ph.D. in mechanical engineering in the Biological, Actuation, Sensing, and Transport (BAST) Laboratory at Southern Methodist University, Anuruddha Bhattacharjee set out to engineer modular robotic cubes equipped with magnetic connectors and embedded magnets, enabling them to interact and form various configurations. These modular robotic cubes were manipulated wirelessly using an external magnetic controller, opening new avenues for milli-/microscale reconfigurable robotic systems.
Dr. Bhattacharjee needed to design and fabricate functional modular cubes with magnets embedded in their face that could be manipulated with an external electromagnetic controller. The cubes had 2mm edges with ten 300µm holes for the embedded magnets. For the cubes to operate properly, they needed precise micro-holes in the faces for embedding the magnets. The team turned to high-precision 3D printing with projection micro stereolithography (PµSL) to fabricate the cubes with the precise micro-hole.
Once the functional modular cubes were fabricated with embedded magnets, they were tested in an electromagnetic triaxial Helmholz coil setup for controlled self-assembly, on-demand disassembly, and reconfiguration tasks. The precise motion of the individual cubes is crucial for the successful self-assembly of the modular robots. The precise motion is dependent on the accuracy of the cube’s fabrication. Most standard 3D printers do not provide the required precision and accuracy. Using the microArch S140, Dr. Bhattacharjee could quickly fabricate the cube with accurate dimensions.
“Within just two weeks, we received our 3D printed parts. The microArch S140 accurately produced the precise dimensions based on our design file. The BMF team’s effective communication enabled us to accelerate our research process and obtain results earlier than anticipated. Given their efficient communication, product delivery, and responsiveness, we highly recommend BMF as a reliable partner for long-term collaboration.”
The reconfigurable modular robots can be wirelessly manipulated with an external magnetic controller and self-assembled or disassembled on command. The small-scale cubes fabricated with PµSL technology and the availability of biocompatible materials opens possibilities for using magnetic modular robots for surgical tools and biomedical applications.


Boston Micro Fabrication is the world leader in micro-precision 3D printers utilizing Projection Micro Stereolithography (PµSL) technology. Many leading companies worldwide are adopting PµSL to 3D print true microstructures with ultra-high…

Ultra-high Accuracy, Precision, and Resolution Micro 3D Printed Medical Device Manufacturing
Discover how the use of micro-precision 3D printing is aiding medical device producers to tackle two common issues through this white paper.
Join over 90,000 engineering professionals who get fresh engineering news as soon as it is published.



About Us · Contact Us · Editorial Team · Advertising · Privacy Policy · Subscriber Services · © 2026 Digital Engineering 24/7 · Peerless Media