Helping design and engineering professionals discover, evaluate and specify technologies and processes that shorten the design cycle and enable success.
Alert!
Digital Engineering ceased publication on July 1, 2026. This website remains available as an archive of engineering content.
For inquiries or information, please email [email protected].
May 2026 Special Focus: Artificial Intelligence in Design and Simulation
In this Special Focus Issue, learn about the latest developments in the integration of artificial intelligence into engineering workflows.

April 2026 Special Focus Issue: Generative Design
In this Special Focus Issue, Digital Engineering takes a look at how generative design solutions can be used across different types of design problems and with a variety of manufacturing approaches to accelerate design space exploration, and…
Ross' journey began as an idea to connect toy robot parts, but now one of Ross Robotics' customized robots is being used in the European Organization for Nuclear Research's (CERN) Large Hadron Collider to help monitor and maintain equipment in hard-to-reach and dangerous areas. Along the way Ross tried different CAD applications to help bring his nature-inspired design sketches to reality, but was discouraged with their learning curve until a friend introduced him to Solid Edge.
We caught up with Philips after his presentation at SEU 2015 (see the video above) to find out more about his approach to robotics design.
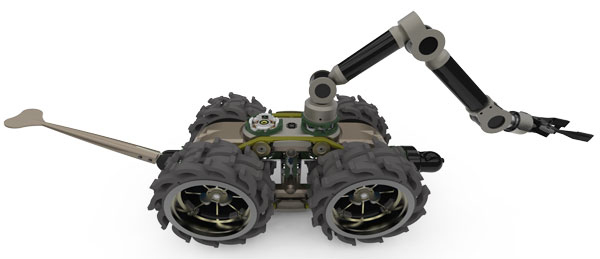
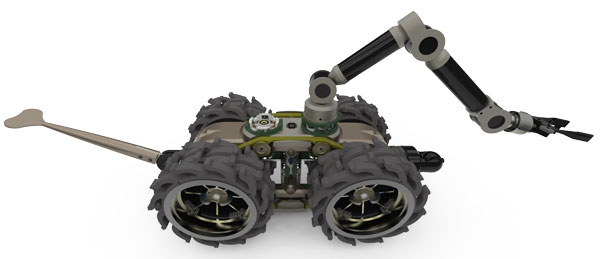 Ross Robotics' Armourdillo modular robot. Image courtesy of Ross Robotics.
Ross Robotics' Armourdillo modular robot. Image courtesy of Ross Robotics.DE: You have worked as an artist, writer and craftsman, but you mentioned you once studied fluid mechanics, can you tell me a bit about that? Was that something you did formally?
Ross: I was a student at Cambridge University from 1978 to 1981 and my course was initially geography (before switching to English literature). Within the geography course fluid mechanics was one of a number of areas of specialization, related to riverine erosion, also to erosion under glaciers and ice sheets.
DE: How interested in technology in general were you before you began working on the modular robotic system? Was it your first foray into robotics/electronics ?
Ross: As a child I would dismantle things like electronic devices to try to understand how they worked, in the process usually destroying them, and I was often making things that mixed technologies — electricity, mechanics, a variety of materials. I designed and built pyramidal HiFi speakers and other elements of HiFi systems. I have worked on cars and on outboard engines and have had over the years to perform most tasks related to building houses including complete plumbing and electrical installations. I knew nothing about robotics however prior to getting involved back in 2006.
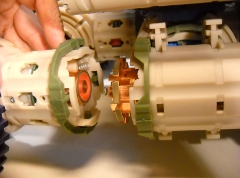 Ross Robotics' three-dimensional connector requires no tools and has no cables to connect. Image courtesy of Ross Robotics.
Ross Robotics' three-dimensional connector requires no tools and has no cables to connect. Image courtesy of Ross Robotics.DE: Can you tell me about the night your aerospace engineer friend introduced you to Solid Edge? What made you see it differently than the other CAD software you had tried ? What about it helped you stick with it past the initial learning curve?
Ross: My friend was running a team of engineers developing the APU (auxiliary power unit) on the Airbus A380 and was shocked that I was drawing the parts for my modular system. Within the first few hours I found Solid Edge extremely easy to get working on with a user interface that seemed familiar, perhaps not unlike interfaces I knew from Microsoft. Other systems that I had experimented with on 30 day trials seemed impenetrable. At least that is how it seemed to me at the time. Key was that I got results very quickly from Solid Edge, so there was immediate payback for the effort of learning something new. Because I was developing a system that was three dimensionally extremely challenging to conceive, the ability to create assemblies of parts, and update and see the updates immediately in assembly, was a major encouragement. The relational steps when creating assemblies also helped conceive the system, that system of alignments, coplanar relationships etc. I then discovered that I could make parts up from assemblies of sub-units and this further freed me to experiment and try out options, keeping the process very quick and fluid. This then felt like the process I was familiar with when painting or writing. More recently, Synchronous modeling has sped things up.
DE: How long did you work on the connector design? How important was Solid Edge to that?
Ross: The connector design work stretched over about two years. The first stage focused on devising means of creating three dimensional circuitry in a monolithic structure, then geometries that would mate to create reliable connectors. The second stage took this to a higher level of sophistication to carry multiple channels of power and data and higher amperages, to make the connector galvanically relatively inert and to find a low cost manufacturing method. There are further evolutions underway focused on higher speed data and another means of tool-free locking. Solid Edge made it possible to postulate ambitious concepts and to try them out very rapidly. Some of the geometries and the interrelations of parts are extremely difficult to visualize. Using a combination of assemblies, cross sections of assemblies and parts, wireframe views and technical drawings all combined to create a general familiarity and ‘feel’ for the functionality of the evolving system and to see potential issues at each step of the way, also to keep parallel evolutions going until the most promising won out.
DE: Have you become familiar with/used other design technologies such as 3D printing or virtual testing via simulation and analysis software?
Ross: I have used 3D printing on a number of occasions, also simulation to analyze the mechanical performance of parts and of assemblies, also mold-flow analysis for plastics injection.
DE: What gave you the idea to go from toys to a modular robotic platform?
Ross: The toy market is high volume and low margins. The modular robotic platform can address this market, also education, however it seemed prudent to focus initially on low volume and higher margin markets. I obtained grant funding from sources unrelated to the toy market and this in part prompted the shift in focus.
DE: You mentioned that you simplified a jack plug from 21 parts to just a few parts. Can you tell me how you did that consolidation and whether you did anything similar with other parts?
Ross: The Jack Plug was one of the first parts that demanded simplification because it was too expensive and complex for us to attempt to manufacture in its 21-part formulation. The monolithic solution to making the plug evolved out of the earlier concepts for the 3D circuitry for the connector. Here I had found ways to create circuits in 3D that can carry quite large amperages. It is in part a manufacturing process and in part the geometries that make this possible, also the choice of materials. Most recently I have developed a battery module that integrates the wiring loom within its structure. This means that there are very few parts and assembly is rapid and straightforward with little to rattle loose and fail.
DE: You compared your platform approach to an iPhone. What is your company doing to make it easy for suppliers/developers to create tools for your platform?
Ross: We are currently developing a set of tools and design rules for developers to create modules for our platform. We will be posting information on our web site in the New Year.
DE: What's next on the horizon for your platform?
Ross: We are engaging in one or more collaborations with technology partners and customers with the focus on developing artificial intelligence that expands the performance envelope of the robot platform, notably autonomous operation, real-time mapping and navigation, dynamic obstacle avoidance, multiple agent deployment and various user interfaces. All these systems will have multiple layers of resilience built into them to ensure that the system is exploitable in harsh real-world conditions.
Watch the modular robot show off its stair-climbing abilities here:

Jamie Gooch is the former editorial director of Digital Engineering.
Follow DE


About Us · Contact Us · Editorial Team · Advertising · Privacy Policy · Subscriber Services · © 2026 Digital Engineering 24/7 · Peerless Media