Helping design and engineering professionals discover, evaluate and specify technologies and processes that shorten the design cycle and enable success.
Alert!
Digital Engineering ceased publication on July 1, 2026. This website remains available as an archive of engineering content.
For inquiries or information, please email [email protected].
May 2026 Special Focus: Artificial Intelligence in Design and Simulation
In this Special Focus Issue, learn about the latest developments in the integration of artificial intelligence into engineering workflows.

Design & Simulation Software Guide 2025
In this Special Issue, Digital Engineering presents its second annual guide to design and simulation software vendors.
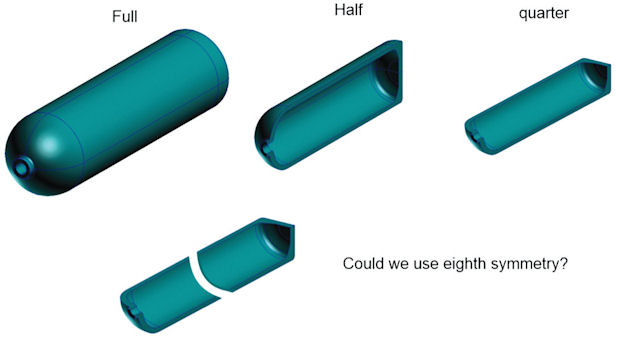
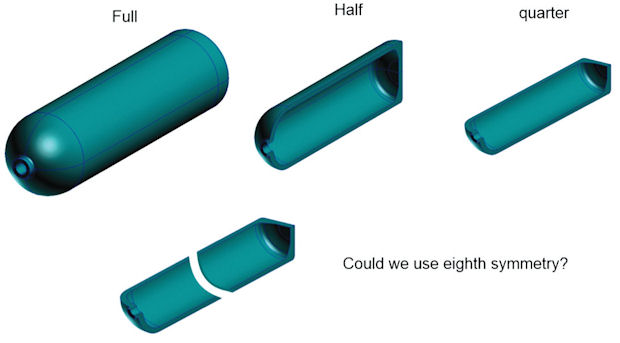 Fig. 1: Planar symmetry forms of a scuba tank.
Fig. 1: Planar symmetry forms of a scuba tank.Editor’s Note: Tony Abbey teaches live NAFEMS FEA classes in the US, Europe and Asia. He also teaches NAFEMS e-learning classes globally. Contact [email protected] for details.
Advances in finite element analysis (FEA) software solution efficiency, computing hardware power and available storage have meant a dramatic increase in the size or scope of the FEA models we can run. The size is reflected in the number of elements, or mesh density, we can use in a model. The scope is reflected in the type of analysis we are running. There is a trend to run more advanced analyses that include greater realism in the simulation of the physics involved.
The advanced analyses, such as non-linear, fracture mechanics and others, are more demanding in terms of computing resources -- and there may come a point where a fully modeled component takes unacceptably long run times. At that point, we can look to some of the earliest forms of model simplification techniques to reduce the element count, and to allow us to run complex analyses within the resource budget.
I can remember more than 20 years ago hearing declarations that these methods were obsolete now that we have “modern” computing power. However, they have stood the test of time and I still use them today in many projects. Let’s take a look at one of these methods, planar symmetry (we will cover other simplification methods in future articles).
Fig. 1 shows a scuba tank that is modeled in full, and then various forms of planar symmetry. We know that the cost of solution time is approximately proportional to n^2, where n is the number of degrees of freedom (DOF). Thus, the motivation in going to half or quarter symmetry is to achieve a cost-savings factor of 4 or 16. If a non-linear analysis is going to be reduced from 16 hours to 1 hour, then that is significant.
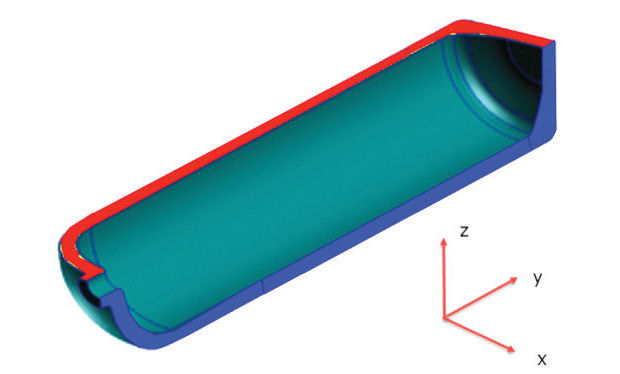 Fig. 2: Symmetry planes.
Fig. 2: Symmetry planes.There are some rules associated with selecting planar symmetry -- the geometry, material, loading and boundary conditions all have to exhibit symmetry.
Considering the half-symmetry scuba tank case, the geometry is clearly symmetric. If we held the real half-structure on a glass mirror plane, then the real and virtual halves would form a full representation of the whole. If we were creating the full model in CAD or an FEA preprocessor, this would probably be part of our strategy. The quarter symmetry is equally obvious.
A question arises: Why not slice further? Usually we stop at quarter or eighth symmetry simply because the main global coordinate system naturally forms these cutting planes. We can slice further, but we that would fall into sector symmetry -- or in the limit, axi-symmetry.
The one-eighth symmetry shown in Fig. 1 looks curious, and violates our requirement for true geometric planar symmetry. However, it is a good example of how we can “push” symmetry. The motivation would be a cost savings of 64 on the full model.
If our objective is to investigate the details of each end of the scuba tank, the nozzle region and the flat-bottomed end, then we could run two models of one-eighth symmetry each. One model would be a double-nozzle scuba tank; one would be a double flat-ended tank.
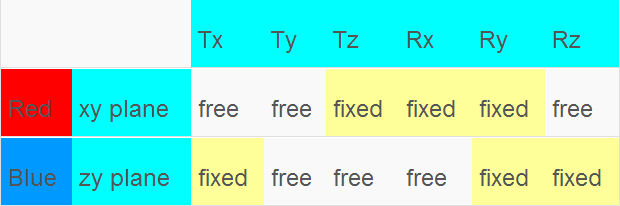 Fig. 3: Symmetry boundary conditions for a quarter scuba tank model.
Fig. 3: Symmetry boundary conditions for a quarter scuba tank model.At first glance, this doesn’t make much sense. However, the stresses in the two ends are independent of each other and stabilize along the wall of the tank between the two ends, because they are far enough away from each other to allow the stresses to diffuse.
Put another way, the stresses at the center slice are the same in both eighth-symmetry models. The net savings is a factor of 32 if we run two models. Each investigates the relevant region in detail. Our main problem is going to be convincing the certification authority, client or lead engineer that this makes sense. The factor of 32 can be applied toward a much finer mesh, or more incremental steps in a non-linear analysis.
If the parallel wall section were very short, we could not use this one-eighth symmetry plane, as the stiffness at each end would interact and the stresses would be dependent on the specific combined geometry.
One other convenient aspect of eighth symmetry is that no external constraint other than the symmetry constraints is required. This is often an advantage in structures that are in balance under applied loading and do not require a “skyhook” to hold them. A full FEA model would be awkward to constrain, however, without introducing unwanted load paths. How would you hold the scuba tank full model without introducing unrealistic constraint reactions? We will come back to that in a future article on minimum constraints.
Other requirements for symmetry include loading. Pressure loading is conveniently planar symmetric in all our cases. However, if we put an external load on one side of the wall only, perhaps from a handling operation, this destroys the symmetry. A half-symmetric model would imply an equal and opposite load; quarter symmetric would imply four loads at 90°, and so on.
There are ways to deal with this using symmetry and anti-symmetry boundary condition models, but superimposing them though the process is awkward and error-prone. Some solvers can set up and combine results automatically, but in the absence of this functionality I would avoid this approach.
The constraints also have to be symmetric, so if this were a heat exchanger, for example, and one wall was supported locally, the opposite symmetric wall would have to have the same support feature.
Material symmetry is usually only a problem when considering composites. If this was a helical filament wound pressure tank, then strictly speaking we have a herringbone disjoint pattern in each angle ply across the symmetry plane. This can be overcome by assuming a smeared equivalent stiffness.
This last point illustrates how we can “cheat” a little when using symmetry. If there is a handle on one side of the scuba tank, for example, and we decide it is not structurally significant, we can either assume a fake extra handle about the mirror plane, or just leave the handle off the model. Features that are not quite truly symmetric can be adjusted to make them symmetric, as long as the effective stiffness and key local stresses are not affected.
Symmetry conditions are enforced through the definition of correct boundary conditions, which make the structure respond across the boundary as if a “virtual” structure was there and complies with the response of the full structure. In Fig. 2, the red cut boundary face is in the xy plane. The coordinate system or the model can be moved to achieve this.
Imagine the cut surface placed against a mirror face. If we slide our real model in x, will the virtual model follow properly? Yes, it will. If we slide the real model in y, will the virtual model follow? Again, the answer is yes. Now consider moving the real model in z, away from the mirror plane. What will the virtual model do? It will split away from the real model -- literally cracking it in half. Thus, we cannot allow a displacement across the boundary condition in z.
Now, onto the rotations. Can we rotate about x? No, this will dip one end into the mirror plane, and pull one end out, destroying our combined real and virtual image. The same argument is made for rotation about y. If we rotate about z, though, the real and virtual rotate together in the mirror plane and simulate the half model well.
In this manner, we are building a table of fixed and free constraints. The full table is shown in Fig. 3. Also included are the constraints for the blue cut face, which lets you check for the correct sense.
One thing to notice about Fig. 3 is that for each cut surface, the translations and rotations are opposites. This is a nice tip for that Monday morning feeling -- focus on the translations, and just put in the opposite for the rotations.
If all our symmetry requirements are met, it is tempting to use this approach in either a normal modes analysis or buckling analysis. In both cases, the full structure will respond with a set of symmetric and anti-symmetric mode shapes. We will only capture the symmetric mode shapes, which are just a subset of the full physical response.
For example, the half symmetry of the scuba tank will allow an extensional (stretching mode) in y, and both a dilatational and a bending mode in the zy plane. The bending in the xy plane and the first torsional mode are eliminated. Similar subsets of higher-order modes are also eliminated.
Any dynamic response analysis done using these modes is doomed to failure.
Linear buckling will follow a similar incomplete pattern: Non-linear buckling will inhibit free migration from symmetric to non-symmetric, or vice versa.
Simplification of FEA models using planar symmetry is a powerful tool that’s still relevant in today’s analysis environment. With some ingenuity, a wide range of models can benefit from the method.

Tony Abbey is a consultant analyst with his own company, FETraining. He also works as training manager for NAFEMS, responsible for developing and implementing training classes, including e-learning classes. Send e-mail about this article to [email protected].
Follow DE


About Us · Contact Us · Editorial Team · Advertising · Privacy Policy · Subscriber Services · © 2026 Digital Engineering 24/7 · Peerless Media