Helping design and engineering professionals discover, evaluate and specify technologies and processes that shorten the design cycle and enable success.
Alert!
Digital Engineering ceased publication on July 1, 2026. This website remains available as an archive of engineering content.
For inquiries or information, please email [email protected].

May 2026 Special Focus: Artificial Intelligence in Design and Simulation
In this Special Focus Issue, learn about the latest developments in the integration of artificial intelligence into engineering workflows.

Design & Simulation Software Guide 2025
In this Special Issue, Digital Engineering presents its second annual guide to design and simulation software vendors.
 Daedalus, the 11th-generation solar vehicle from University of Minnesota students.
Daedalus, the 11th-generation solar vehicle from University of Minnesota students.One is called Daedalus, named after the master craftsman in classical mythology. Another is called B-7, a descendent of Faust and Faust II. Both are chasing the sun.
 In the Greek myth saga, Daedalus constructed a set of wings for his son Icarus, who attempted to fly to the sun with it. A group of undergraduate engineering students from the University of Minnesota decided to name their solar car after the mythical engineer. The vehicle doesn’t have wings; it relies instead on Sunpower C60 solar cells and a 16kW-per-hour Lithium-ion battery for its speed.
In the Greek myth saga, Daedalus constructed a set of wings for his son Icarus, who attempted to fly to the sun with it. A group of undergraduate engineering students from the University of Minnesota decided to name their solar car after the mythical engineer. The vehicle doesn’t have wings; it relies instead on Sunpower C60 solar cells and a 16kW-per-hour Lithium-ion battery for its speed.
About 1,000 miles east in Canada, the University of Toronto students came up with their own solar car called B-7, preceded by older models Faust and Faust II. The B-7 isn’t selling its soul to the devil like Goethe’s Faust did to ensure success, however. Instead, it shed some of its weight by using solar cells made of 22% silicon.
In the 2013 World Solar Challenge, both vehicles shared a 3,000-km stretch of the Australian outback. They also shared something else: The engineering teams behind Daedalus and the B-7 relied on digital human models, simulation software, and visualization to perfect the aerodynamics of their sun-chasing chariots.
In 1997, the University of Toronto’s Blue Sky Project produced its first solar car, simply called Blue Sky. It was, according to the team’s online history page, “an experimental effort … to learn more about the production of solar vehicles.” The original model evolved into Blue II (1999), Faust (2001), Faust II (2003), Cerulean (2007), and Azure (2011) before becoming the B-7, which finished in eighth place in the World Solar Challenge 2013. Each incarnation served as a lesson for the next.
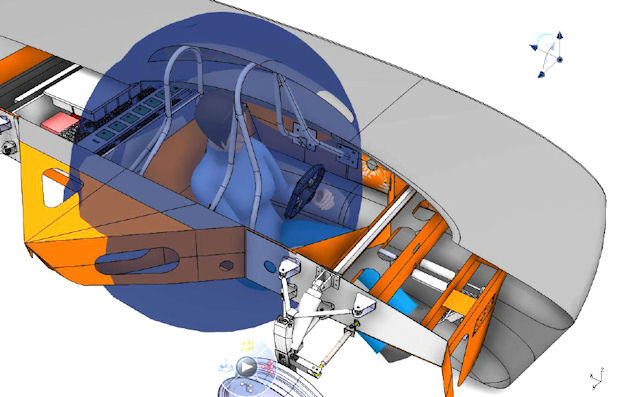
 With workstations accelerated by NVIDIA Quadro K5000 GPUs, the University of Minnesota student engineers were able to visualize the inner mechanism of their vehicle Daedalus.
With workstations accelerated by NVIDIA Quadro K5000 GPUs, the University of Minnesota student engineers were able to visualize the inner mechanism of their vehicle Daedalus.“The parts were made by different teams, but the main assembly -- the body and the chassis -- was in CATIA V6,” said Kshitij Gupta, mechanical team lead for the B-7. While using CATIA from Dassault Systemes, Gupta and his teammates stumbled on human models, or digital manikins -- part of Dassault’s DELMIA virtual prototyping software suite.
When manufacturers began relying on digital models instead of physical mockups to simulate and test their products, CAD software vendors anticipated the designers’ need to incorporate digital human models to check proportion, reach and ergonomics. The DELMIA human model, complete with joints that can be manipulated, is part of that small but growing market -- digital stunt doubles that you can deploy to perform stressful, strenuous and dangerous tasks in a virtual environment so you won’t need a real human volunteer to do it later.
 The Blue Sky solar car project from the University of Toronto employed a digital manikin from Dassault Systemes’ CATIA software to study and analyze the driver’s reach and ergonomics inside the B-7.
The Blue Sky solar car project from the University of Toronto employed a digital manikin from Dassault Systemes’ CATIA software to study and analyze the driver’s reach and ergonomics inside the B-7.Gupta notes that Dassault’s Ergonomic Workbench in CATIA “has an inbuilt database of sizes of humans” according to nationality (Japanese, Canadian, etc.), sizes (according to percentiles), and sex (male/female). The B-7 design team selected a 50 percentile Canadian female, a manikin that best represented the intended driver’s stature and build.
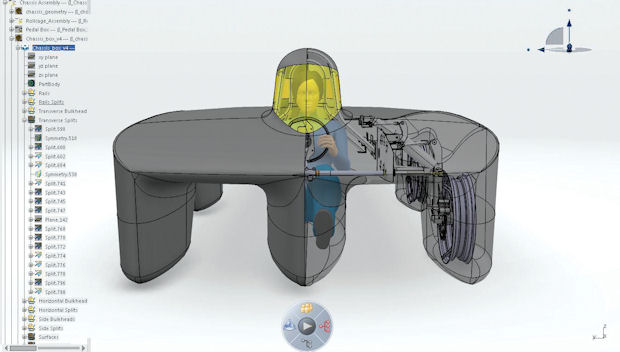 Instead of building the vehicle and then revising it to accommodate the driver, the B-7’s engineers designed the chassis and frame around the driver.
Instead of building the vehicle and then revising it to accommodate the driver, the B-7’s engineers designed the chassis and frame around the driver.The manikin has movable joints to allow the engineers to place her in the driver seat and try out various positions. If a certain position is ergonomically ill-advised, a warning symbol cautions the engineers to shun the position. Using this method, the B-7’s team could conduct what’s known in CATIA as rapid upper limb assessment (RULA) analysis, and obtain scores that reveal the relative comfort (or discomfort, as the case may be) of the driver.
“Rather than design a chassis first, then go through iteration to fit the manikin, we designed the car around the manikin,” Gupta explains. “That tells us whether the driver would be comfortable in that position driving eight hours a day.” With the digital manikin, the design team could determine the driver’s ability to reach essential instrumentation panels, seatbelts, radio, water bags, and fans as the vehicle’s shape was developed. In previous design cycles, these measurements were approximated.
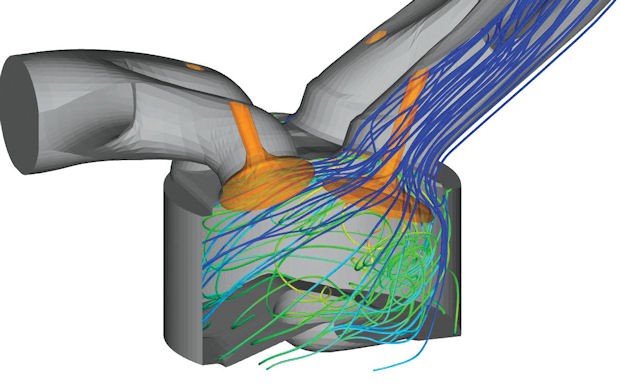 Streamlines show the intake process for a spark-ignition engine in a FORTE simulation.
Streamlines show the intake process for a spark-ignition engine in a FORTE simulation.The driver position is highly constrained in accordance with the National Code of Practice for Light Vehicle Construction and Modification (NCOP) in Australia, Gupta says. Therefore, the use of the digital manikin also helped the engineers ensure their design complies with the NCOP standards before they started manufacturing the car parts.
The B-7 was expected to run efficiently with 1 kW of power -- roughly what it takes to power a hairdryer. For that to be accomplished, the designer needed the car’s aerodynamics to give peak performance. The team uses ANSYS CFX software to run flow simulation to study and improve the vehicle’s aerodynamics.
The width of the driver seat’s bucket fairings was optimized to fit the potential driver, explains Gupta: “Furthermore, the main horizontal foil (on which we place the solar array) was made such that it just encompasses the shoulders of the manikin, thus the broadest part of the body was seamlessly integrated into the aero body without unnecessarily widening either the canopy or the butt fairing. The canopy width was also optimized, such that it just fit the driver’s head and roll cage. The manikin ensured that we did not overdesign the driver space, which might lead to a higher frontal area and thus higher aerodynamic drag.”
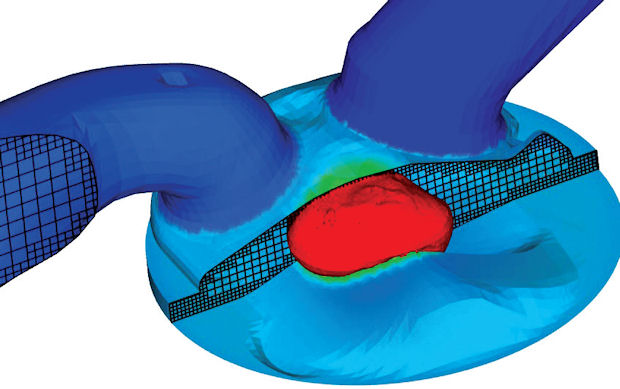 DISI-combustion: Flame propagation for spark-ignition engine simulation, cut plane showing automatically generated mesh.
DISI-combustion: Flame propagation for spark-ignition engine simulation, cut plane showing automatically generated mesh.Becoming all too familiar with the digital manikin, they decided to refer to it by name. Initially, the avatar was nicknamed Beverly and Picard, no doubt after the Star Trek characters. But it was recently renamed Legolas, after the elven archer from Lord of the Rings. “Our driver doesn’t look like Legolas [played by actor Orlando Bloom with long flowing hair and prosthetic ears]. It’s just a joke,” clarifies Gupta.
The dawn of the University of Minnesota Solar Vehicle Project (UMSVP) was a vehicle completed in 1993, dubbed Aurora. Since then, the project has produced 11 vehicles and raced in 24 events in five countries. By the time of the latest car, Daedalus, it has grown to involve as many as 50 undergraduate students.
Throughout its long history, the project has also amassed a large repertoire of reusable design data, archived in PTC Creo Parametric format (previously Pro/ENGINEER format). “The school as a whole uses PTC Creo software primarily. We really like [PTC Creo Parametric’s] surface modeling tools,” reports Neil Dencklau, project lead for Daedalus. “That helps us design a chassis made out of flat panels and complex organic curvatures.”
Daedalus’ engineers had to strike a balance between the power required to drive the vehicle and the aerodynamic gain and loss. “In previous races, we found out the biggest power consumption came from aerodynamic drag,” Dencklau says. To offset the drag, the vehicle must increase its power, thus placing a burden on the vehicle’s performance. “So we have to look at the best shape [for aerodynamics], and how to position the driver. For example, if we shift the driver’s height, how does it affect the drag? Where should he or she sit in the car?”
The design team employed a mix of digital manikin placement (part of PTC Creo software), flow simulation with ANSYS CFX, and mechanical simulation with ANSYS Mechanical to refine the vehicle’s shape and driver positioning. “Daedalus is a two-seater, so we had two digital manikins with helmets on inside the car [in the digital tests]. That’s how we decided on where the seats should be placed, how much space was needed around them, and how much clearance was needed in our roll cage,” Dencklau explains.
Software makers PTC and ANSYS were both sponsors of the project; therefore, the students had easy access to the professional CAD and simulation software titles from the companies. The trouble, however, was the underpowered computers with which they had to work.
“Our computer budget is relatively small,” acknowledges Dencklau. “We built our own desktops with [Intel Core] i7 processors with 16GBs of RAM.” For graphics boosts, the machine relied on consumer-level GPUs -- suitable for videogame and multimedia playback, but not ideal for the precision required in CAD visualization. Project sponsor NVIDIA offered the team Quadro K5000 GPUs, certified for professional CAD and simulation programs.
“Having a powerful GPU made all of the difference in the world,” says Mitchell Rogalsky, part of the design team. “With our prior systems, performance was about three frames per second. It was simply impossible to work interactively with our vehicle models.”
Dencklau agrees. “Once we installed the Quadro K5000 GPUs, we found that we were able to load the top-level assembly of the vehicle and manipulate it efficiently,” he adds. “And we noticed we were able to increase the quality of our rendering. Previously, when we had gaming GPUs, [the machines] just couldn’t keep up with the work.”
The high-pixel photorealistic display was not just eye candy. “With smoother edges and better rendering, we were able to see how things interact better,” says Dencklau. “With a higher frame rate, we were able to rotate the model quicker. It made modeling a lot easier.”
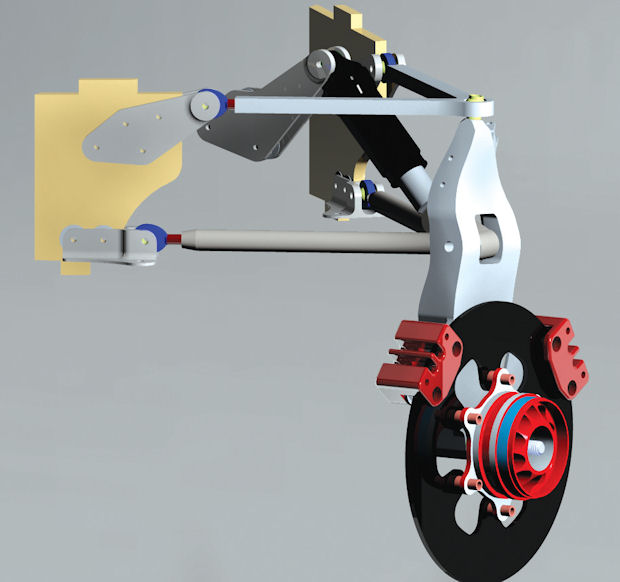
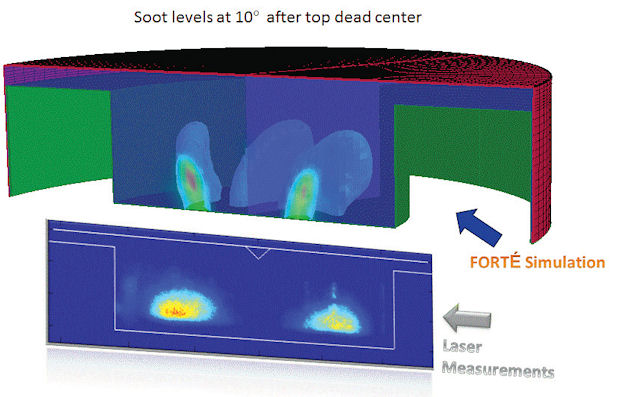 Simulation (above) and experimental measurement (below) showing regions of soot formation in the engine cylinder during combustion. Measurement is reproduced from A.P. D. Cruz, J.-P. Dumas and G. Bruneaux, SAE Technical Paper Series, 2011-01-1390, 2011.
Simulation (above) and experimental measurement (below) showing regions of soot formation in the engine cylinder during combustion. Measurement is reproduced from A.P. D. Cruz, J.-P. Dumas and G. Bruneaux, SAE Technical Paper Series, 2011-01-1390, 2011.The ability to visualize the mechanical interaction was critical to the design of the front suspension region -- “the most complicated area,” Dencklau says. “There are lots of movements there. For instance, we needed to see how far the doors on the fairings are opening when making a turn [a feature to reduce drag]. All those mechanisms are driven by the steering wheel. We needed to be able to visualize how all those interacted with one another.”
The project usually takes up to two years to build a car, partly thanks to the demands of the students’ class schedules and homework. With Daedalus, the team had an extremely short design cycle: They had to design and manufacture a car in about nine months to compete in an upcoming World Solar Challenge. To speed up the manufacturing, the team manufactured the custom-designed battery cages in 3D printing, with help from project sponsor Stratasys, a 3D printer maker. “It was just cheaper than manufacturing them, and a lot faster,” Dencklau says.
In the UMSVP project report published for 2013-14, the design team boasts, “Daedalus incorporated the best of the previous Aurora, Borealis and Centaurus vehicles, while continuing to push the technological boundary. Daedalus competed in the cruiser class of the 2013 Bridgestone World Solar Challenge, where she placed fourth.”
UMSVP’s Daedalus finished second place in the American Solar Challenge in July 2014. For more, read “Quantum of Solar” to learn about the University of Michigan team that claimed the first prize in that race.

Kenneth Wong is Digital Engineering's resident blogger and senior editor. Email him at [email protected] or share your thoughts or suggestions at digitaleng.news/facebook.
Follow DE


About Us · Contact Us · Editorial Team · Advertising · Privacy Policy · Subscriber Services · © 2026 Digital Engineering 24/7 · Peerless Media