Helping design and engineering professionals discover, evaluate and specify technologies and processes that shorten the design cycle and enable success.
Alert!
Digital Engineering ceased publication on July 1, 2026. This website remains available as an archive of engineering content.
For inquiries or information, please email [email protected].
May 2026 Special Focus: Artificial Intelligence in Design and Simulation
In this Special Focus Issue, learn about the latest developments in the integration of artificial intelligence into engineering workflows.

April 2026 Special Focus Issue: Generative Design
In this Special Focus Issue, Digital Engineering takes a look at how generative design solutions can be used across different types of design problems and with a variety of manufacturing approaches to accelerate design space exploration, and…
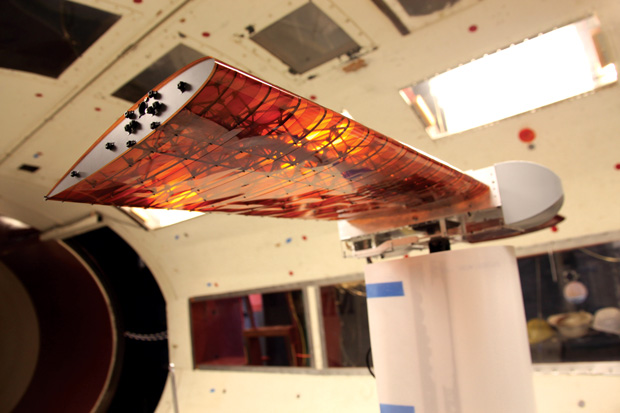
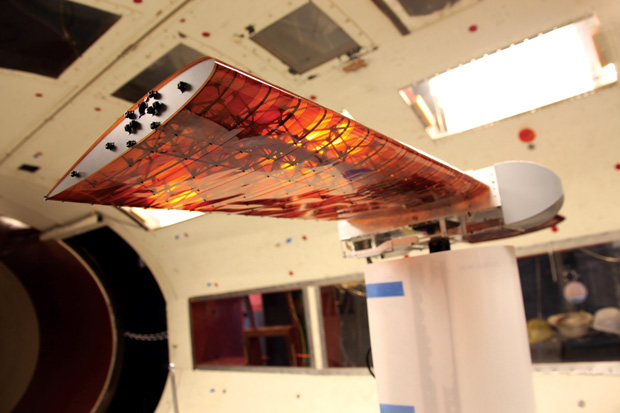 With the MIT team’s approach, the whole shape of the wing can be changed and twisted uniformly along its length by activating two small motors that apply a twisting pressure to each wingtip.
With the MIT team’s approach, the whole shape of the wing can be changed and twisted uniformly along its length by activating two small motors that apply a twisting pressure to each wingtip.Engineers at NASA and MIT’s Center for Bits and Atoms (CBA) combined new digital materials concepts with a highly advanced robotic assembly method to create a new, “bendable” wing architecture that optimizes lift and roll. The benefits of such an approach applied to an aerospace application like wing design, researchers say, is to increase aerodynamics and thus improve fuel efficiency and reduce greenhouse gas emissions.
Yet beyond its potential impact for aerospace applications, the research initiative is fueling innovations in the nascent field of soft robotics, the practice of applying soft materials like silicone and plastic to create robotic structures that are more biologically accurate and capable of changing shape to ensure safer, highly sensitive interaction. Soft robotics reached a milestone this summer when Harvard’s Wyss Institute for Biologically Inspired Engineering unveiled the Octobot, the first robot to contain no plastic or metal parts while also employing pneumatics and chemistry, not electronics, to achieve autonomous operation. (Editor’s Note: Read more at "Beyond Organic Shapes.")
Unlike the Octobot and other soft robotics efforts that rely on the use of elastomeric materials like rubber and manufacturing methods such as casting or 3D printing, MIT/NASA’s digital materials concept stakes claim to a more scalable approach, making it better suited for the construction of large-scale objects like aircraft wings or wind turbine blades, according to Ben Jennett, a graduate student at MIT and a key contributor to the project. The MIT/NASA research effort is based on the concept of assembling any number of tiny, lightweight pieces into a structure--in this case, an aircraft wing--with each building block or component precisely tuned for flexibility and movement (hence the digital materials concept), he explains. The result, Jennett says, is the ability to combine both hard and soft characteristics into a single lattice geometry structure while achieving far greater scalability than what has been accomplished with many of the early soft robotics research projects.
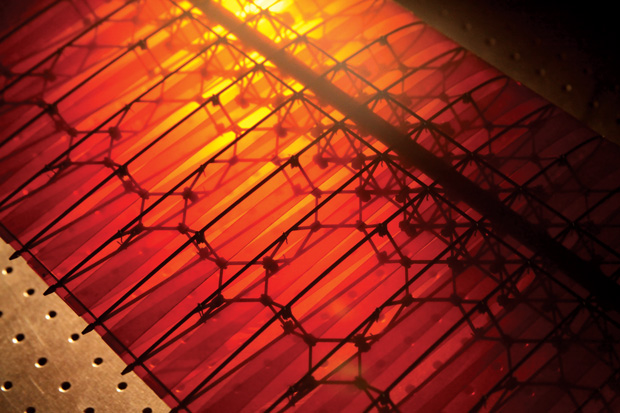 The basic principle behind the new concept is the use of an array of tiny, lightweight structural pieces, referred to as “digital materials,” that can be assembled into a virtually infinite variety of shapes. Image courtesy of Kenneth Cheung/NASA.
The basic principle behind the new concept is the use of an array of tiny, lightweight structural pieces, referred to as “digital materials,” that can be assembled into a virtually infinite variety of shapes. Image courtesy of Kenneth Cheung/NASA.“Our contribution to soft robotics is the ability to achieve the materials properties of elastomeric materials at ultra light density with scalability and the ability to use heterogeneous materials,” Jennett says. “We’re hoping that those in the soft robotics field will recognize our approach as a way to build compliant robots.”
There are two primary pieces to the MIT/NASA research: The modular system of tiny, lightweight LEGO-like building blocks that comprise the wing structure and an advanced manufacturing technique that calls for a team of specialized and synchronized robots to assemble the subunits into a whole.
The building blocks are essentially an ultralight cellular solid created by stitching together modular 2D elements at a voxel level and fine-tuning their performance characteristics and the geometry of their assembly, Jennett explains. This digital materials approach gives design teams the flexibility to achieve high levels of stiffness and strengths in some areas of a particular structure while also incorporating compliant and energy-absorbing characteristics in others. In addition, the design approach, which is supported by a unique robot assembly ecosystem, is more scalable than creating lightweight lattice structures with additive manufacturing (AM) techniques that rely on a continuous process of extrusion, he says.
“By using a discrete set of parts, we can tune local properties to determine global properties--that’s the innovation,” Jennett says. “When you think of a material as something that’s digital, you have bit-level control over the properties of whatever you are building.”
The digital materials concept also advances the scalability of the kinds of structures you can produce with soft robotics characteristics and ultra lightweight materials. With AM production techniques, design engineers are limited by the size of a printer’s build platform, among other factors, and the inability to make use of heterogeneous materials to fully optimize designs. With the MIT/NASA developed technique, one cellular building block could be carbon fiber and another elastic, and an engineer could combine them in ways that make the most sense for specific design objectives. “Think of it as different LEGO bricks of different colors, but in this case, it’s different materials properties,” Jennett explains. “Our approach brings micro-level control to a macro scale, which can be applied to large-scale designs like airplane wings or wind turbine blades.”
This approach to design and manufacturing large-scale systems like airplane wings is also well suited for on-going maintenance and design work. The LEGO-like parts are reusable, thus can be put together with various fastening techniques in different ways while also disassembled fairly easily for repairs. Contrast this with AM, which is a continuous process of extruding plastic or depositing metals, which is a hard thing to undo, Jennett says.
“When there’s s structural defect or error on a giant fuselage blade made by laying down composite tape, the whole thing has to be scrapped, which compromises the integrity of the monolithic element,” he explains. “With our approach, if one part is damaged, it can be easily replaced.”
MIT put its digital materials concepts to the test with the NASA wing project. The goal was to create a wing design that would allow for twisting in a precise way that eliminates the need for separate structural pieces (like those found in conventional wing design) and that also delivers a smooth, aerodynamic surface. To that end, the researchers created a skin to house the LEGO-like brick components and optimize the structure’s performance. This part of the design takes its cue from nature--bird feathers or fish scales, to be exact--by layering strips of flexible materials that move across each other as the wing flexes, but that still retain a smooth exterior surface, according to researchers.
Based on early wind tunnel tests, researchers found that the cellular solid wing design proved to match the aerodynamic properties of a conventional, rigid wing model at about one-tenth the weight while also exhibiting the potential to increase lift, Jennett reports. The soft robotic wing structure also supports a level of drag reduction that isn’t possible with the rigid model, the researchers found. Following the initial wind tunnel exploration, the team further tested the concepts by creating a flyable unpiloted aircraft, which included the wing structure along with a motor, at a California airfield and achieved promising results. Future plans call for building an entire aircraft--wing, tail and fuselage--with digital materials, he added.
While the initial bendable wing was hand assembled, future digital materials efforts will involve the new robotic fabrication process that deploys a series of small robots to assemble the structure and actually do so in the operating environment. This would lend itself to the production of large-scale wind turbine blades, Jennett says, which could be assembled at the point of operation without having to incur the expense of transportation and logistics.
“In order for digital materials to actually materialize as the transformative material they should be, it does require automation,” he says.
More Info

Beth Stackpole is a contributing editor to Digital Engineering. Send e-mail about this article to [email protected].
Follow DEJoin over 90,000 engineering professionals who get fresh engineering news as soon as it is published.



About Us · Contact Us · Editorial Team · Advertising · Privacy Policy · Subscriber Services · © 2026 Digital Engineering 24/7 · Peerless Media